publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2022
2021
-
 ViTac: Integrating Vision and Touch for Multimodal and Cross-Modal Perception [Editorial]Frontiers in Robotics and AI, 2021
ViTac: Integrating Vision and Touch for Multimodal and Cross-Modal Perception [Editorial]Frontiers in Robotics and AI, 2021
2020
-
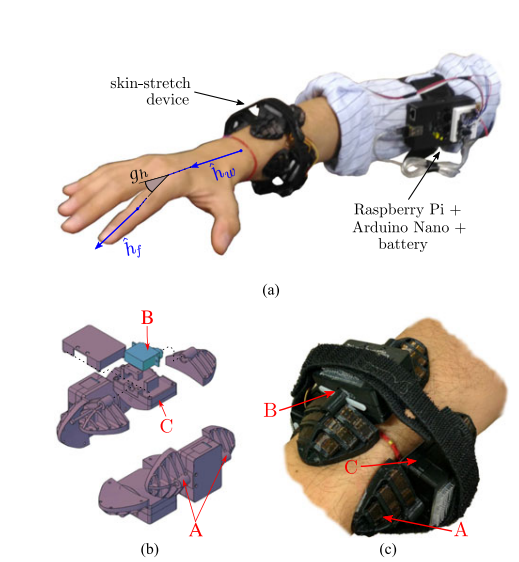
 Trajectory Control For a Myoelectric Prosthetic WristIn MEC Symposium Conference, Feb 2020
Trajectory Control For a Myoelectric Prosthetic WristIn MEC Symposium Conference, Feb 2020 -
 Trajectory Control for 3 Degree-of-Freedom Wrist Prosthesis in Virtual Reality: A Pilot StudyIn 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Feb 2020
Trajectory Control for 3 Degree-of-Freedom Wrist Prosthesis in Virtual Reality: A Pilot StudyIn 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Feb 2020 - Soft Hand-Environment Interaction in Grasping TasksIn Shaping quality metric of a grasp with the manipulation task: Grasping as a sub action of object manipulation, Workshop at ICRA 2020, Feb 2020
2019
-
 Collision detection and isolation on a robot using joint torque sensingIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Feb 2019
Collision detection and isolation on a robot using joint torque sensingIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Feb 2019 -
 Towards a Virtual Reality Interface for Remote Robotic TeleoperationIn 2019 19th International Conference on Advanced Robotics (ICAR), Feb 2019
Towards a Virtual Reality Interface for Remote Robotic TeleoperationIn 2019 19th International Conference on Advanced Robotics (ICAR), Feb 2019
2018
-
 The Closure Signature: A Functional Approach to Model Underactuated Compliant Robotic HandsIEEE Robotics and Automation Letters, Jul 2018
The Closure Signature: A Functional Approach to Model Underactuated Compliant Robotic HandsIEEE Robotics and Automation Letters, Jul 2018 -
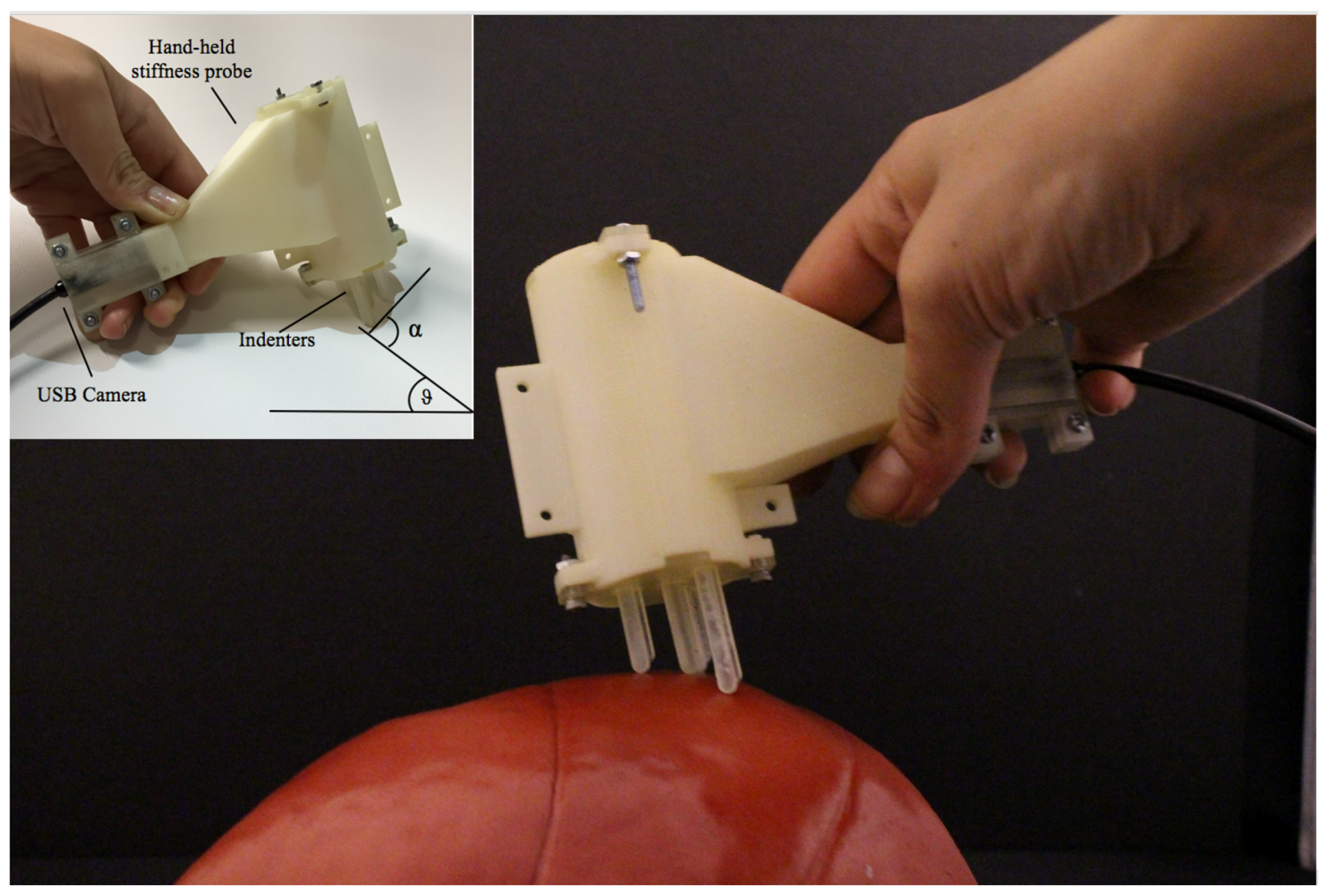 Real-Time Vision-Based Stiffness MappingSensors (Basel, Switzerland), Jul 2018
Real-Time Vision-Based Stiffness MappingSensors (Basel, Switzerland), Jul 2018 -
 Transparency-optimal passivity layer design for time-domain control of multi-DoF haptic-enabled teleoperationIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2018
Transparency-optimal passivity layer design for time-domain control of multi-DoF haptic-enabled teleoperationIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2018 -
 Transparency-oriented passivity control design for haptic-enabled teleoperation systems with multiple degrees of freedomIn IEEE Conference on Decision and Control (CDC), Jul 2018
Transparency-oriented passivity control design for haptic-enabled teleoperation systems with multiple degrees of freedomIn IEEE Conference on Decision and Control (CDC), Jul 2018 -
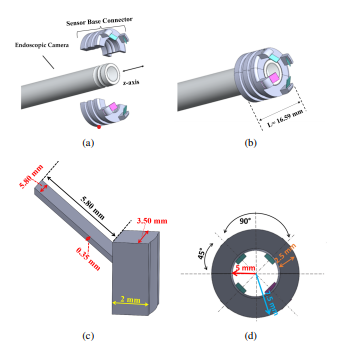 Disposable Stiffness Sensor for Endoscopic ExaminationIn 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Jul 2018
Disposable Stiffness Sensor for Endoscopic ExaminationIn 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Jul 2018
2017
-
 Teleoperation in cluttered environments using wearable haptic feedbackIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2017
Teleoperation in cluttered environments using wearable haptic feedbackIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2017 -
 Particle-filter-based estimation of the location and force of robot collisions using torque measurementsIn Revisiting Contact - Turning a problem into a solution Workshop at RSS’17 [Poster], Jul 2017
Particle-filter-based estimation of the location and force of robot collisions using torque measurementsIn Revisiting Contact - Turning a problem into a solution Workshop at RSS’17 [Poster], Jul 2017 - Optimizing Damping Factors in a 3DoF Passive Two-layer Approach for Bilateral TelemanipulationIn Work-in-Progress session at World Haptics ’17 [Poster], Jul 2017
-
 Robotic tactile perception of object properties: A reviewMechatronics, Jul 2017
Robotic tactile perception of object properties: A reviewMechatronics, Jul 2017
2016
-
 In-hand Object Pose Estimation using Covariance-Based Tactile To Geometry MatchingIEEE Robotics and Automation Letters, Jul 2016
In-hand Object Pose Estimation using Covariance-Based Tactile To Geometry MatchingIEEE Robotics and Automation Letters, Jul 2016 -
 Stable Grip Control on Soft Objects With Time-Varying StiffnessIEEE Transactions on Robotics, Jul 2016
Stable Grip Control on Soft Objects With Time-Varying StiffnessIEEE Transactions on Robotics, Jul 2016 -
 A New Miniaturised Multi-Axis Force/Torque Sensors Based on Optoelectronic Technology and Simply-Supported BeamIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2016
A New Miniaturised Multi-Axis Force/Torque Sensors Based on Optoelectronic Technology and Simply-Supported BeamIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2016 -
 Multi-Axis Force/Torque Sensor Based on Simply-Supported Beam and OptoelectronicsSensors, Jul 2016
Multi-Axis Force/Torque Sensor Based on Simply-Supported Beam and OptoelectronicsSensors, Jul 2016
2015
-
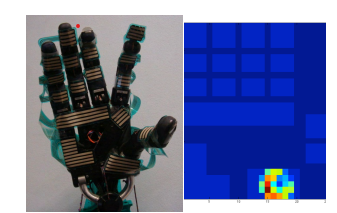
 Multi-axis Stiffness Sensing Device for Medical PalpationIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2015
Multi-axis Stiffness Sensing Device for Medical PalpationIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2015 -
 Finger contact sensing and the application in dexterous hand manipulationAutonomous Robots, Jul 2015
Finger contact sensing and the application in dexterous hand manipulationAutonomous Robots, Jul 2015 -
 Global estimation of an object’s pose using tactile sensingAdvanced Robotics, Jul 2015
Global estimation of an object’s pose using tactile sensingAdvanced Robotics, Jul 2015 - Object Pose Estimation Using Tactile to Geometric Covariance MatchingIn IROS Late Breaking Results Session [Poster], Jul 2015
- Soft Fingers for Robotic GraspingIn Perceptions on Soft-based Contact workshop at IEEE CASE 2015 [Invited Talk], Jul 2015
2014
-
 Control a contact sensing finger for surface haptic explorationIn IEEE Int. Conf. on Robotics and Automation (ICRA), Jul 2014
Control a contact sensing finger for surface haptic explorationIn IEEE Int. Conf. on Robotics and Automation (ICRA), Jul 2014 -
 Novel uniaxial force sensor based on visual information for minimally invasive surgeryIn IEEE Int. Conf. on Robotics and Automation (ICRA), Jul 2014
Novel uniaxial force sensor based on visual information for minimally invasive surgeryIn IEEE Int. Conf. on Robotics and Automation (ICRA), Jul 2014 -
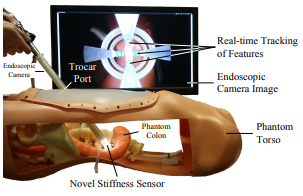 Endoscopic add-on stiffness probe for real-time soft surface characterisation in MISIn 36th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society (EMBC), Jul 2014
Endoscopic add-on stiffness probe for real-time soft surface characterisation in MISIn 36th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society (EMBC), Jul 2014
2013
-
 Combining touch and vision for the estimation of an object’s pose during manipulationIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2013
Combining touch and vision for the estimation of an object’s pose during manipulationIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2013 - Fusing Visual and Tactile Sensing for Manipulation of Unknown ObjectsIn Mobile Manipulation Workshop on Interactive Perception at ICRA 2013 [Poster], Jul 2013
2012
-
 Intelligent Fingertip Sensing for Contact Information IdentificationAdvances in Reconfigurable Mechanisms and Robots I, Jul 2012
Intelligent Fingertip Sensing for Contact Information IdentificationAdvances in Reconfigurable Mechanisms and Robots I, Jul 2012 -
 Tactile image based contact shape recognition using neural networkIn IEEE Conf. on Multisensor Fusion and Integration for Intelligent Systems (MFI), Jul 2012
Tactile image based contact shape recognition using neural networkIn IEEE Conf. on Multisensor Fusion and Integration for Intelligent Systems (MFI), Jul 2012 -
 Object pose estimation and tracking by fusing visual and tactile informationIn IEEE Conf. on Multisensor Fusion and Integration for Intelligent Systems (MFI), Jul 2012
Object pose estimation and tracking by fusing visual and tactile informationIn IEEE Conf. on Multisensor Fusion and Integration for Intelligent Systems (MFI), Jul 2012 -
 Object surface classificaiton based on friction properties for intelligent robotic handsIn World Automation Congress (WAC), 2012, Jul 2012
Object surface classificaiton based on friction properties for intelligent robotic handsIn World Automation Congress (WAC), 2012, Jul 2012 -
 Surface material recognition through haptic exploration using an intelligent contact sensing fingerIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2012
Surface material recognition through haptic exploration using an intelligent contact sensing fingerIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2012 -
 A novel dynamic slip prediction and compensation approach based on haptic surface explorationIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2012
A novel dynamic slip prediction and compensation approach based on haptic surface explorationIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2012 -
 Adaptive grip control on an uncertain objectIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2012
Adaptive grip control on an uncertain objectIn IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Jul 2012 - Active Perception of Objects for Robot GraspingIn Closing the Action-Perception Loop Workshop at IROS 2012 [Presentation], Jul 2012
- Managing Coordinate frames with ROSIn Handling ROS Introductory tutorial to ROS and its use for robot in-hand manipulation Workshop at IROS [Workshop], Jul 2012
- Finger Surface Following Control through Intrinsic Contact SensingIn Autonomous Grasping and Manipulation: An Open Challenge at ICRA [Poster], Jul 2012